



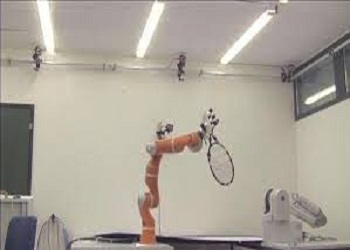
ذراع روبوتي قادر على التقاط الاشياء الموجهة نحوها
هذا الذراع الروبوتي، طور في ألمانيا ولكن فكرته تعود إلى باحثين في مدرسة الفنون التطبيقية الاتحادية بلوزان في سويسرا.
الذراع الروبوتي طوله حوالي متر ونصف المتر وهو مزود بسبعة مفاصل ويد متطورة بأربعة أصابع، يمكنها التحرك للمسك بمجموعة متنوعة من الأجسام الطائرة التي تلقى باتجاهها.
من خلال مجموعة من الكاميرات، يستطيع هذا الذراع الروبوتي خلق نموذج لحركة الأشياء استنادا إلى مساراتها وسرعتها وحركتها الدائرية.
يقول هذا الباحث:” نحن نعلم الروبوت كيفية الوصول إلى شيء ما، انطلاقا من مواقع مختلفة، في الوقت ذاته، نعلمه التنسيق، يجب عليه تحريك الذراع والأصابع حتى ينجح في المسك بشيء ما، ونحن نجمع البيانات التي تساعد الروبوت على التنبؤ بالحل الأمثل لينجح في الوصول الى شيء ما وإغلاق أصابعه حوله في الوقت الصحيح أيضا”
العلماء يقولون إنه يمكن استغلال تقنية هذا الروبوت في الفضاء الذي سيتمكن من التقاط الحطام المتطاير.
يقول هذا الباحث:“لنفترض اننا وضعنا هذا الروبوت على قمر صناعي، يمكنه مراقبة الحطام حلال حركته الدائرية، ويمكنه أن يقدر سرعته والموقع الذي سيتوجه اليه. وبذلك سيتكيف مع حركته واتجاهه بهدف الإمساك به واعادة الحطام فيما بعد إلى الأرض”
الذراع الروبوتية يتمتع بدقة كبيرة في التقاط الأشياء، لأنه خلال بضعة أجزاء من الثانية، يمكنه تصحيح مساره في الوقت الحقيقي وبدقة عالية للإمساك بأي شي يلقى باتجاهه.
 رد مع اقتباس
رد مع اقتباس